(Digitális szervo szabályzó, szénkefés, DC motorokhoz)

![]() Profi2S
CNC Servo Vezérlő
Profi2S
CNC Servo Vezérlő![]()
(Digitális szervo szabályzó, szénkefés, DC motorokhoz)
![]() Gyártása
megszüntetve!
Gyártása
megszüntetve!![]()
Tekintse meg az utódját:
Profi2 Quantum Servo szabályzót!

(Profi2S Digital Servo Driver)
Módosítva: 2009. szeptember 01. kedd
Gyártása beszüntetve!
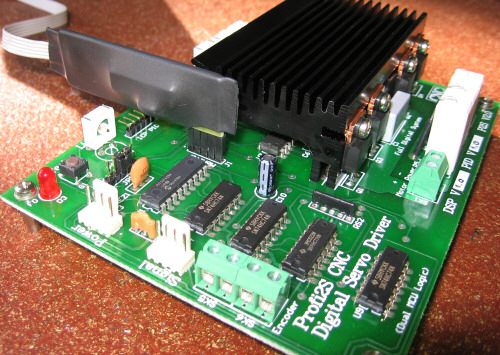
A Profi2S CNC Digital Servo Controller egyenáramú (DC), szénkefés szervomotor vezérlésére képes. Egyaránt alkalmas hobbi és félprofesszionális CNC alkalmazásokra. Step/Dir rendszerű bemenete és tápfeszültség igénye teljesen illeszkedik a Profi2 CNC Vezérlőcsaládba (Profi2B Báziskártyához) és így akár vegyes hajtásmódú (szervo+léptetőmotoros) CNC-k is építhetőek (költséghatékony, kevert kialakítások)! Egységes, moduláris felépítése révén, tetszőleges tengelyszámú és típusú Vezérlések építhetőek. Tervezésénél fontos szempont volt, a népszerű Mach CNC vezérlő programokhoz való minél optimálisabb illeszkedés. Nagyteljesítményű, kettős processzoros kialakítása révén, igénytelen az alkalmazandó szervo vagy szervo jellegű, DC motorokra, így széles skálájú motor illeszthetőséggel rendelkezik! Alkalmazható mind professzionális, mind házi építésű szervo motorokhoz! Kétszintű, összetett motorvédelmi rendszere révén, magas szintű motorszabályzást valósít meg, messze meghaladva az általános hobbi igényeket.
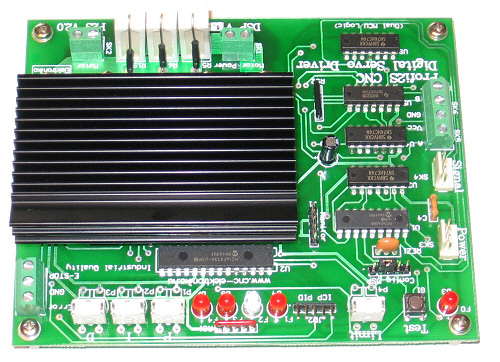
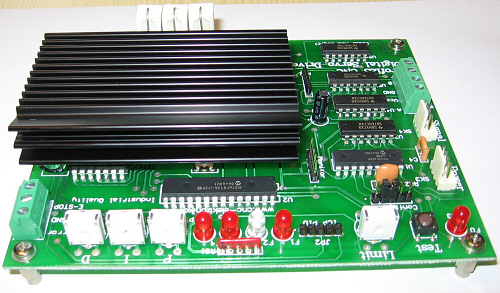

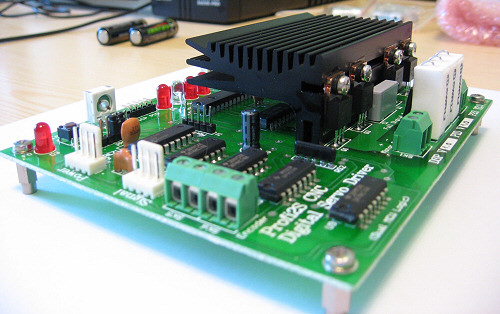

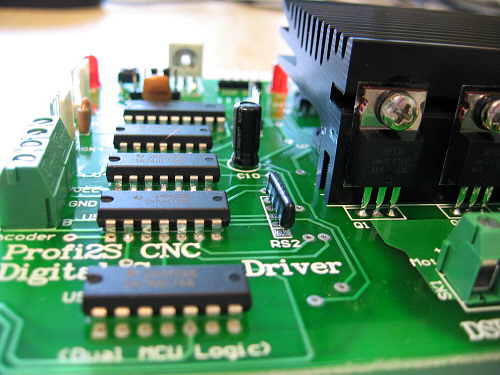
(Nagyítás = klikk!)
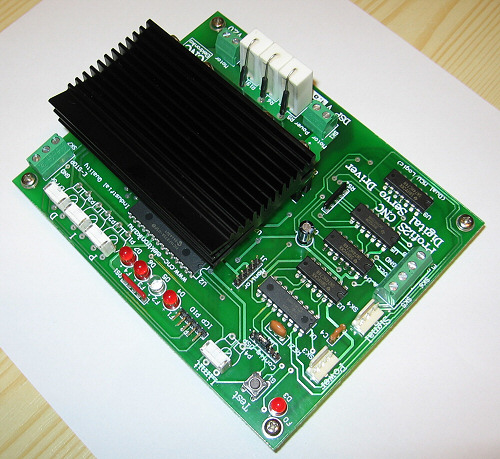
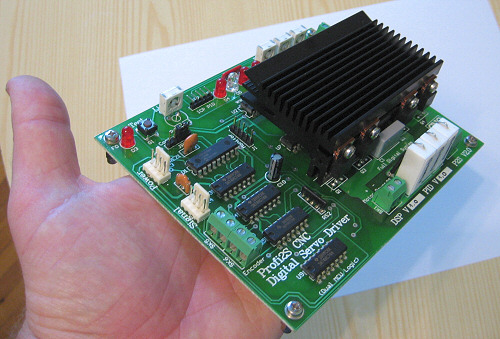
Profi2S Compact kialakítás:

Információk itt!
![]() Főbb
műszaki paraméterek (DSP V1.3 + PID V1.3):
Főbb
műszaki paraméterek (DSP V1.3 + PID V1.3):
- Step/Dir rendszerű vezérlő bemenetek (Schmitt-triggerezett TTL),
- sorolható kialakítás, tengelyenkénti vezérlés, vegyes módú alkalmazhatósággal,
- DC, szénkefés, szervo motor szabályzás, teljes PID algoritmussal,
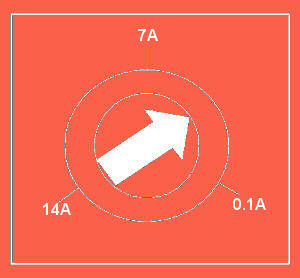
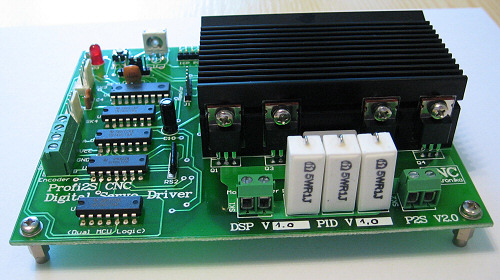
- max. DC 90V, folyamatos 10A-es, csúcsáram 14A-es erőátviteli FET híd (Rev. 1.),
- dinamika fokozó kapcsolás (áram túllövéses szabályzás),
- 10 bites PWM-es gerjesztés szabályzás (20kHz),
- ellenáramú és passzív (PID által kevert módú) motorfék kezelés,
- kétcsatornás (A, B), quadrature encoder kezelés,
- TTL és OC encoder bemenetű szintillesztés (digitális/analóg), tápellátással,
- nagysebességű, kettős processzor kialakítás (DSP + PID),
- frissíthető (ICP-n keresztüli) Firmware-k,
- max. 51 kHz léptetési frekvencia,
- 200 - 1000 osztású, optimalizálható, encoder kezelés,
- Profi2B táp és jel kompatibilitás,
- stressz vizsgálat (Test nyomógombbal),
- +- 65535 Step virtuális hiba puffer,
- valósidejű hibajel monitorozás és rekord készítés (Profi2S Servo Monitor + monitor adapterrel, RS232C-n keresztül),
- könnyű (jumper + trimeres) konfigurálás (DSP + PID),
- összetett hibajel és állapot LED jelzések,
- POST erőátviteli tesztek és hibajelzések ,
- E-Stop bemenet, vész leállítással (motorfékes stop),
- kétfokozatú, belső védelmi rendszer,
- Error signal kimenet (gyűjtött TTL hibajel a PC felé),
- termikus túlterhelés védelem (thermo szenzorral érzékelt, hűtőborda hőfok figyelés),
- Error puffer túlfutás védelem,
- Slip (követési) hiba jelzés,
- motor csúcsáram korlátozás (trimeres setup-pal, és jelzéssel),
- motor megszorulás védelem,
- Encoder túlpörgés védelem,
- Mach3-ra optimalizált, nagy sebességű, impulzus memória,
- nagyfokú zavarvédettség,
- telepített, fix hűtés,
- kétoldalas, részben SMD szerelésű PCB.
- stb...
![]() Firmware
V1.3: Növelt teljesítményű tartóági nyomaték, blokkoló encoder túlpörgés
védelem, növelt intenzitású Stressz Teszt funkció!
Firmware
V1.3: Növelt teljesítményű tartóági nyomaték, blokkoló encoder túlpörgés
védelem, növelt intenzitású Stressz Teszt funkció!
Dokumentáció (V1.3.0):
(Profi2S_Gepkonyv_ V130.pdf1.6MB)
Figyelem! A legfrissebb információk/változások mindig az online gépkönyvben (lentebb) olvashatóak (hamarabb)!
(PCB V2.0)
A Profi2S CNC Servo Vezérlő, egyenáramú, szénkefés
villanymotorok, kétcsatornás, növekményes encoderen keresztüli, szervo
szabályzású hajtását végzi el. Az encoderes visszacsatolás révén, zártkörű, pozíció
szabályzás valósul meg.
Ellentétben egy léptetőmotoros vezérléssel, itt szabályzás történik, - ezért
helyes beállítások esetén - nem
lehetséges lépésvesztés! A szabályzó elektronika jóval több információból
dolgozik, e miatt lényegesen intelligensebb hajtásmód valósítható meg. A
szabályzó (PID) kényszeríti a motort a kívánt pozícióba (pozíciójáról mindig
pontos ismerete van az encoder révén), és ha ez mégsem lehetséges (pl.
megszorulása miatt), akkor ezt a PC felé jelezheti és lehetőség van a hibáról
értesülni és kijavítani, akár a munka közben is!
Az összetettebb hajtásmód (PID)
beszabályozása bonyolultabb, mint egy léptetőmotoros vezérlőé. A PID
beszabályozásakor történik a Vezérlő ráhangolása az adott motor+mechanika
együttesére (sőt kismértékben még a CNC vezérlő program beállításaira is).
A PID beszabályozásához ennél a Vezérlőnél, kisegítő elektronikával és mérő
szoftverrel támogatott, látványos és kézben tartható segéd eszközről
gondoskodtunk! Ez opcionálisan beszerezhető! Ez az eszköz a Profi2S Servo
Monitor, mely egy digitális, tárolós oszcilloszkóp módjára, tárolja és
megjeleníti a szervo szabályzás tranzienseit.
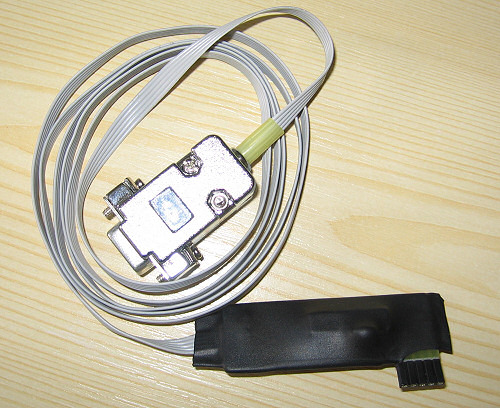
(Profi2S Servo Monitor adapter, RS232C)
(csatlakozás a monitor tüskesorra)
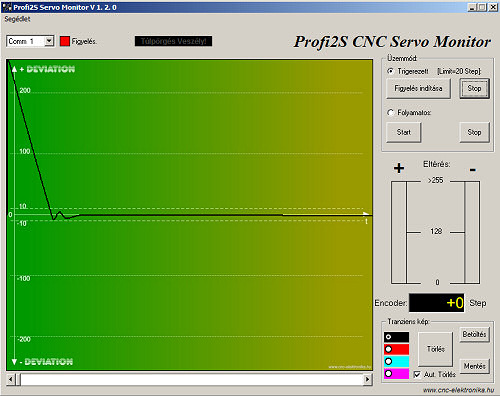
(Profi2S Servo Monitor szoftver)
Magáról a PID szabályzókör beállításáról a Motor Tuningnál olvashat!
A következő feltételeknek kell megfelelnie az alkalmazni kívánt
motornak:
90V alatti, egyenfeszültségről (DC) működtethető legyen,
Kefés motor legyen.
Névleges áramfelvétele 10A alatt legyen.
A motor szervo jellegű legyen (az encoderrel felszerelt típusok már ennek a
feltételnek mind megfelelnek).
Encoderrel fel nem szerelt típusoknál érdemes a következőket
megnézni:
Tengelyét megforgatva simán, rángatásoktól mentesen kell forognia! Nem
megfelelőek a pozíciókba bepattanó típusok!
Szervo motornak alkalmazható DC motor+encoder egybeépített formák (pl. gyári szervók):
 |
 |
| (komplett szervo motor encoderrel) | |
Valamint, DC motor + külön felszerelt Encoder (akár a meghajtott orsó végeire, külön-külön is):




(tengelyvégekre utólag szerelhető Encoderek)
Az Encoderrel szemben támasztott követelmény:
Két fázisú, un. inkrementáló (növekményes) csatornával rendelkeznie kell (A és B csatorna).
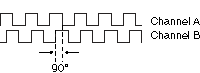
(inkrementáló csatornák, 90°-os fáziseltolással)
A két csatorna négyszögjelei között 90°-os fáziseltolás van,
melyek folyamatosan generálódnak a tengely forgásakor. A két jel egymáshoz
való viszonyából lehet a forgás irányt meghatározni, az impulzusok számaiból
pedig ez elfordulás mértékét.
Sok encoder ezeken kívül még plusz csatornákkal is rendelkezik (pl. index), de
ezeket a Vezérlő nem használja (nem kell bekötni).
A csatornák villamos jelszintjének is illeszkednie kell a
Vezérlő bemenetéhez!
Kétféle jelszint megengedett:
1. TTL jelszintek (+5V-os jelnagysággal),
2. analóg, nyitott kollektoros (OC*) tranzisztoros kimenetek (a Vezérlő tartalmazza a belső 2k2-os felhúzó ellenállásokat és egyéb jelformáló tagokat).* OC= open collector (tranzisztoros, nyitott kollektoros kimenet)
Az encoder csatlakozója (SK5, SK6) tartalmazza a TTL
tápfeszültségeket is, az Encoder esetleges tápellátásához (+5V, max. 100mA
terhelhetőséggel).
Az ajánlott encoder felbontás 200 .... 1000 Step/fordulat közé essen!
Lehetőség van az encoder alapfelbontásának 2 fokozatú módosítására (lásd majd
lentebb).
Az encoder felbontása és a Vezérlő DSP beállítása, együttesen fogja
meghatározni a szervo motor felbontását, amit a CNC gép egyéb mechanikai
áttételezése tovább módosít és végén ezek együttese határozza meg a gépünk
programozható felbontását (legkisebb programozható elmozdulását). Részleteket
a Motortuningnál olvashat erről!
Elérhető servo motor:

(DC 24V, 65W, 2700 r/min, 500-as encoderrel)
Rendszerbe integrálás, PC kapcsolat:
A Profi2S CNC Servo Vezérlő a Profi2-es családba tartozó bármilyen más komponenssel együtt tud működni! A Vezérlő és a PC közötti kapcsolatot a Profi2B Báziskártya teremti meg.
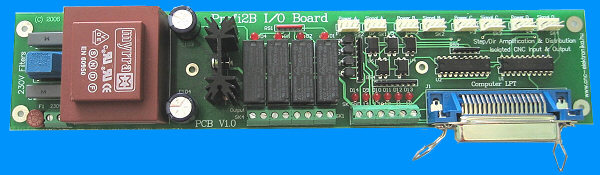
(Profi2B Báziskártya)
A Profi2B kártya biztosítja a Servo Vezérlő számára a szükséges Step/Dir jeleket, valamint a digitális tápellátást is. Egy P2B kártyára max. 4db P2S Vezérlő köthető és így 4 tengelyes CNC Vezérlő hozható létre. Lehetőség van a P2B kártyák megduplázására Mach3 CNC vezérlő szoftver és kiegészítő LPT port használata esetén. A kártyáról részletes információt a Profi2B I/O kártya leírásánál talál!
Lehetőség van az egyes tengelyvezérlők (Profi2S és Profi2A) vegyes telepítésére is!
Ajánlott CNC vezérlő szoftvernek a Mach családot javasoljuk, maximális (45kHz-es) üzemi sebességgel használva!
(Mach3 CNC vezérlő szoftver)
Védelmi funkciók és jelzéseik:

(LED-ek)
A Profi2S CNC Servo Vezérlő kétszintű, összetett védelmi rendszerrel rendelkezik. Néhány funkció kiépítése opcionális, mely a vezérlés komfortját hivatott emelni, más védelem autonóm és a Vezérlőt+motort, önállóan is védi.
Védelmi szintek:
1. Autonóm védelmek. Működésbe lépésük esetén a motort motorfékkel megállítják, a Vezérlőt lekapcsolják és LED jelzéseket adnak. A Vezérlő újraindításával lehet csak kihozni belőle. Minden autonóm védelem hibajelet generál az Error kimeneten, mellyel a PC-n futó CNC vezérlőszoftvert (pl. Mach3) is lelehet állítani.
- POST* teszt:
Minden bekapcsolás alkalmával a Vezérlő leellenőrzi az erőátviteli FET-eket. Ha bármelyik FET-et hibásnak érzékeli, kigyújtja az F1-F2-F3-F4 LED-eket és letiltja a Vezérlőt. A jelzés elsősorban FET zárlatra utal. Ilyen esetbe szervizhez kell fordulni. A teszt, motor tápfeszültség megléte esetén képes a diagnosztikára, akár bekötött vagy hiányzó motor esetén is.*POST = Power On Self-Test
- Error regiszter túlfutás védelme (kétfokozatú):
Ha a hibajel 3s-on keresztül folyamatosan meghaladja 255 Step értéket, a Vezérlő motorfékkel megállítja a motort és letiltja további működését.
Elsősorban fordított Encoder bekötés és motormegszorulás védelmét látja el. Működése esetén jelzést ad az F3-as LED-en keresztül.
Az Error* regiszter (DSP) +- 65535 Step eltérést is képes tárolni, mely ha 3s-on belül korrigálható, nem történik blokkolás. DSP túlfutása esetén ezt az F0-ás LED sűrű villogásával jelzi.* Error regiszter = hibaszint regiszter, mely a kért és a tényleges mechanikai pozíciók közötti eltérést méri encoder Step-ben. Ha nincs eltérés, értéke 0.
- Motor csúcsáram védelem:
A Vezérlő folyamatosan méri a motor áramfelvételét és a Limit trimer által beállított áramérték elérése esetén, azt korlátozza. A korlátozás tényét az F4-as LED kigyújtásával jelzi.- Motor túlterhelés védelem:
Ha motor túláram korlátozása folyamatosan működik 10s-ot meghaladóan, a védelem megállítja a motort és letiltja további működését (az F3-es LED folyamatosan égve marad).- Vezérlő túlterhelés védelem:
A Hűtőborda hőmérsékletét egy thermo szenzor folyamatosan méri és kb. 85°C felett letiltja a Vezérlő további működését. A védelem ezt az F1 LED jelzésével tudatja!- Encoder túlpörgés védelem:
A DSP konfigurálása miatt, elképzelhető olyan beállítás is, mellyel a motor képes az encoderét a megengedett sebességnél nagyobb sebességgel is pörgetni. Ekkor lép működésbe ez a védelem, mely folyamatosan világító F0-ás LED-el jelzi a hiba bekövetkezését, valamint az Error kimeneten hibajelet generál és blokkoltatja a Vezérlőt. A jelzés törléséhez a Test gombot kell megnyomni. A jelzés küszöbszintjének a megállapításához a Profi2S Servo Monitor program tartalmaz segéd kalkulátort (lásd annak a leírásában). Megakadályozza a rendszer impulzus vesztését!2. PC-n keresztüli védelmek. Önmagában nem állítja meg a Vezérlőt, csak hibajelet generál az Error kimeneten. Ha ez a kimenet össze van kötve egy 10V-os Zener-en keresztül a Profi2B kártya egyik Input bemenetével és a vezérlő szoftver megfelelően fel van konfigurálva, akkor ez a jel képes megállítani a végrehajtást úgy, hogy nem történik impulzus vesztés! Bizonyos feltételek mellet a hiba kijavítása után, selejt nélkül fojtatható a munka.
- Slip hibajel (követés figyelés):
Ha az Error regiszter hibaértéke 10 Step-et meghaladja és folyamatosan fennáll 2s-on keresztül, hibajelet generál az Error vezetéken. A hiba fennállása esetén, ezt az F2 LED kigyújtásával is jelzi! Elsősorban rossz PID beállítások és motor túlterhelések jelzésére szolgál. Minősíti a követés pontosságát.
Jól beállított PID szabályzó esetén a követés pontossága +-3 Step értéket nem lépi túl. Mindenkori pillanatnyi értékét, a Profi2S Servo Monitoron ellenőrizhetjük.

(Error + GND + E-Stop csatalakozó)
A Vezérlő rendelkezik vészleállító funkcióval, melyet az
E-Stop bemenet és a GND lábak közé kötött nyomógombbal lehet aktiválni.
Aktiválás esetén a Vezérlő vészfékkel megállítja a motort és blokkolja annak
további működését, valamint hibajelet generál az Error kimeneten. Kihozni
belőle csak újraindításával lehet.
Fontos tudni, hogy a vészleállítás mindig minden körülmények között működik,
míg a PC-n kiadott Stop, a Vezérlő impulzus puffere miatt, akár csak több
másodperc múlva fejti ki hatását! Egy rossz beállítás miatt (PID) lengésbe
került Vezérlőt, csak E-Stoppal, vagy kikapcsolásával lehet megállítani!
Teljes kiépítésében a védelmet így kell összehuzalozni:
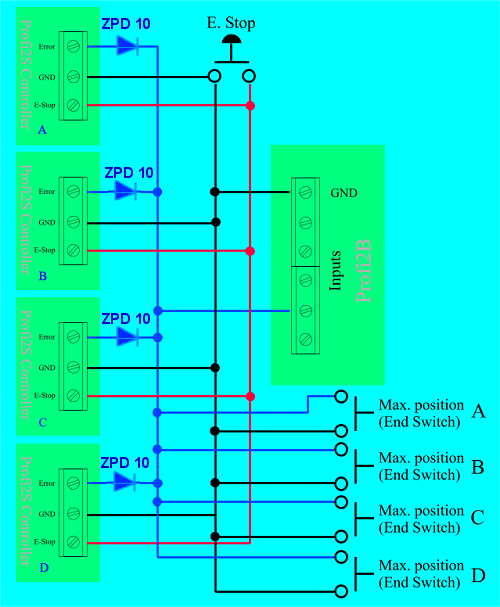
(integrált védelem + végállás bemenetek)
A fenti rajz egy 4 tengelyes Szervo vezérlőt ábrázol, mely
csak 1 Input bemenetet foglal le a Profi2B Báziskártyán, mégis mind az Error
jelet feldolgozza és mind a 4db max. végállás kapcsolót is! Működésük esetén a
Mach3 E-Stopra meg fog állni (helyes bekonfigurálása esetén)! A kapcsolás
tartalmazza a külső E-Stop nyomógombot is, mely helyes Mach3 beállításnál, azt
is megállítja (az E-Stop jele megjelenik a Vezérlő Error kimenetén). Külső E-Stop működtetése esetén nem garantált, az impulzus
vesztés nélküli megállás (0-pont felvétele szükséges lesz utólag)!
A fenti rajz nem tartalmazza a tengelyek másik oldali végállásait (vagy Home
kapcsolóit), erről külön kell gondoskodni (lásd a
Profi2B leírását)!
A ZPD10-es Zener diódák a P2S TTL és a P2B 15V-os jelszintjeit illeszti
egymáshoz!
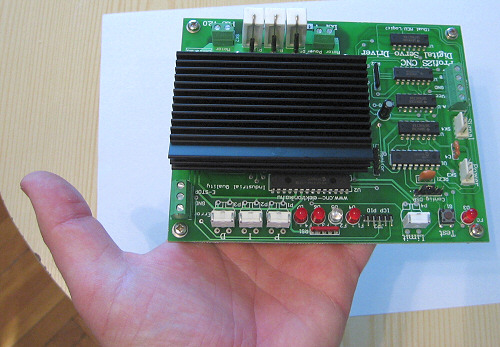
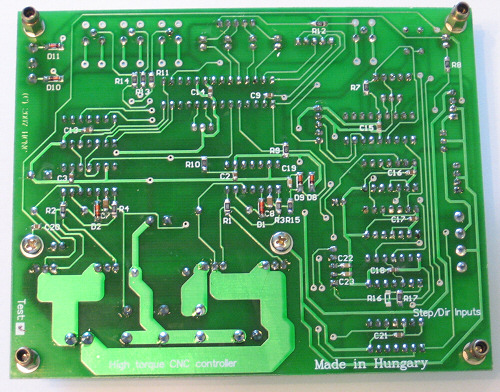
Mechanikai kialakítás és telepítés:
Tengelyenkénti egy kártyás kialakítás, PCB méretei: 140×112 mm,
4db 3mm-es rögzítő furattal. A furatok távolsága: 130×102mm.
Tengelyszámnak megfelelő számú Profi2S kártyát összefogatva, tömbösített
kialakítás létrehozása célszerű (max. 4db csatlakoztatható 1 Profi2B
Báziskártyához).
A Vezérlő, élére állítva (egymás tetejére) szerelhetőségre lett optimalizálva (legkisebb helyigény). A szabad és akadálymentes légmozgást figyelembe véve kell kialakítani a tömböt. A Vezérlő optimális helyzete a rövidebb élére állított, egymás tetejére (hűtőbordák felé, távtartókkal) szerelt , tömbösített kivitel.

(P2S tömbösített kialakítása)
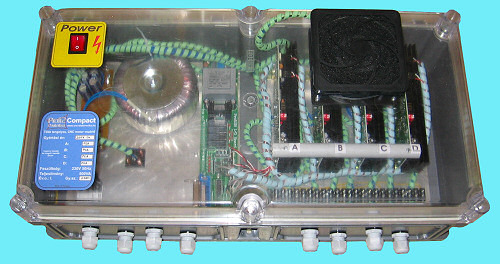
(Profi2 Compact kialakítása)
Zavarforrásoktól (villamos), minél távolabb helyezzük el! Pórtól, mechanikai hatásoktól dobozolással védeni kell (a szabad légmozgás megtartása mellett)! Rázkódásnak ne tegyük ki!
4A névleges áramfelvételű motorok használata felett, kényszerhűtés szükséges (ventillátor)!
Villamos csatlakozások, kötések:
Minden vezetéket árnyékoltan kell szerelni!
A nagyáramú vezetékek (motortáp és motor csatlakozás), valamint az Encoder
bemenetek csavaros
sorkapcsokra lettek kihozva. Alkalmazható vezeték keresztmetszet max. 1.5mm2.
Minden nagyáramú vezeték érpáronként sodrott, és árnyékolt kivitelben ajánlott. Kiválóan alkalmas
erre a 4 eres, érpáronként sodrott, árnyékolt, u.n. ipari 4-20mA-es jelkábel,
0.5mm2-es keresztmetszettel (villamos szaküzletben kapható).

(2×2 sodrot érpár, 0.5mm2-es keresztmetszettel)
Az Encoder vezetékezését feltétlen árnyékoltan kell szerelni!
Törekedni kell a lehető legrövidebb vezetékezésre és a nagyáramú vezetékektől
való lehető legelszeparáltabb elhelyezésére! Az árnyékolst a Vezérlő Encoder
bemenetén található GND-vel kell összekötni! Tilos az árnyékolást (és így a GND
vonalat) a CNC gép fémvázára kötni!
A CNC gép fémvázát a konnektor védőföldelésével kell összekötni!
Amennyiben tápellátást igényel az Encoder, az Encoder közvetlen közelében (ha
belül, eleve még nem lett volna) a tápvezetéket legalább 10uF-os kondenzátorral
szüretni kell (Vcc és a GND vonalra kell kötni)!
A polaritás helyes bekötésre (motortáp) fokozottan ügyelni kell! Fordított
bekötés esetén a Vezérlő tönkremegy!
A nagyáramú vezetékezést a lehető legtávolabb vigyük a Vezérlőtől.
A motor tápfeszültséget nem kell stabilizálni, viszont kondenzátoros szűrésénél az 1000uF/A összefüggést alkalmazni szükséges (a kapacitás túlméretezése nem káros)! A terhelő áramnál a motor(ok) névleges áramát kell figyelembe venni (közös tápnál tengelyenkénti összértéket)!
A motor-tápfeszültség kiválasztásánál az alkalmazott szervo
motor feszültségét kell alapul venni és ennek 1.5× - 2.5× értéke javasolt.
Pl. egy 18V-os szervo motorhoz, 24V - 40V megfelelő.
Kevert hajtásmódú vezérlés építésénél (léptetőmotoros + szervo tengelyek), ha a tápfeszültség megfelel mindkét motortípusnak, akkor használható közös tápegység is!
A kapcsolóüzemű tápegységek (mint pl. a PC tápok) használata nem javasolt (PWM-es áramszabályzás tüskéi megzavarhatják a kapcsolóüzemű táp elektronikáját és indokolatlanul leszabályozhatnak), helyette a klasszikus transzformátor+egyenirányító+kondenzátoros tápok javasoltak!
A motortáp becsatlakozása a Vezérlőbe az SK1 sorkapcson történik. Polaritására ügyeljünk! Használjunk árnyékolt vezetéket!

(Motortáp csatlakozó)
A DC motor kivezetéseit az SK2 sorkapocsba kell kötni. Polaritása nem érdekes, forgásirányát a CNC vezérlő programokon belül meg lehet fordítani.

(Motor csatlakozója)
A vezetékezés keresztmetszeténél a motor névleges áramát kell figyelembe venni. Árnyékolt vezetékezést használjunk!
Digitális Power és Signál csatlakozások:
A digitális táp (Power) és a jel (Signal) csatlakozások tüskesorok. A tüskesori csatlakozások a szabványos PC-s, belső (CD-ROM - Alaplapi) audió (árnyékolt) kábelre lett tervezve. E kábelek (árnyékolt) használata erősen ajánlott (mindkét végén széles, fekete csatlakozó hüvellyel)! A csatlakozások pozícionáltak, fordított bekötésük nem lehetséges.
(Power és Signal csatlakozások)

(árnyékolt jelkábel)
Ügyelni kell a Signal és Power vezetékek fel nem cserélésére! Felcserélődése esetén a Vezérlő azonnal tönkremehet!
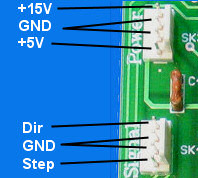
(belső kiosztások)
| Tápfeszültség: | Áramfelvétel (max.): |
| +15V* | 25mA |
| +5V (+-10%) | 35mA + Encoder (tipikusan: 35mA) |
Signal csatlakozó jelszintjei = TTL.
+15V* = Fet gyújtófeszültség, megengedett tartománya: 11V-18V!
A két feszültség felcserélődése károsodást okozhat!
A vezetékek ne érintkezzenek a hűtőbordával (megolvadás
veszély)!
A 4 db. Profi2S Vezérlőt el kell nevezni A-tól D-ig. Érdemes
alkoholos filctollal ráírni a betűjelzését! Később e jelzések alapján lehet a
bitkiosztási táblázat-vezérlő összerendelést elvégezni!
A Profi2S Signal csatlakozóját a Profi2B Signal csatlakozójával kell összekötni
(elnevezés helyesen)!
A Profi2S Power csatlakozóját a Profi2B Power csatlakozójával kell összekötni! A
tápfeszültség csatlakozóknál nincs jelentősége a betűjelzéseknek (egyformák).
A motorok tápfeszültségének kialakításánál lehet egyesített
motor tápfeszültséget alkalmazni (minden motor ugyan azt a tápfeszültséget
kapja), vagy megosztott (akár tengelyenként is) tápfeszültségeket (ilyenkor a
motor mínuszokat kell csak közösíteni).
Tilos a digitális GND (Profi2B) és a motortáp mínuszát a Vezérlőn kívül
egyesíteni (a Profi2S Servo Vezérlőben belül egyesítésre kerülnek)!
Encoder bekötése és tesztelése:
Az Encoder csatlakoztatása az SK5+SK6 sorkapcson történik. A sorkapcson Vcc és GND táp csatlakozások is megtalálhatóak (ha az encoder ezeket igényelné).

(Encoder csatlakozója)
Az encoder vezetékezését feltétlenül árnyékoltan kell szerelni!
Az Encoder tápfeszültség polaritására ügyeljünk, mert fordított bekötése esetén az tönkremehet!
Az Encoder A és B csatornájának felcserélése nem okoz
meghibásodást, de rendellenes Vezérlő működést okoz. Felcserélődése esetén a
Vezérlő a motort max. sebességgel elindítja egyik irányba mivel a visszacsatolás
fordítva fog működni!
Ezért az első élesztéskor a motort nem szabad
összekapcsolni a mechanikával!
Ha ez megtörténne, a Vezérlő 3s múlva megállítja a motort és letiltja további
működését!
Bekötés ellenőrzése:
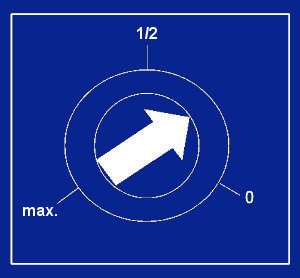
A teljesen összehuzalozott Vezérlő Limit és P trimmerén állítsunk be kb. 1/3 állást (0 pozíció az óramutató forgásával megegyező irányban van), a többi trimmert vegyük teljesen 0-ra!
(P trimmer pozíciója)
(Limit trimmer pozíciója)
Kapcsoljuk be a P2B-t és a motor tápot.
Kézzel óvatosan mozdítsuk meg a motor tengelyét.Ha motor hirtelen elindul (nagy sebességgel), akkor a bekötés fordítva sikerült!
Kapcsoljuk ki a Vezérlőt.Ha a motor nem pörög, akkor jól kötöttük be a sorrendet!
Fordított bekötés esetén vagy az A és B vezetékeket cseréljük fel, vagy a motor gerjesztő (SK2) vezetékeit cseréljük meg!
Encoder kezelés beállítása (felbontás):
A Vezérlő DSP processzora kétfélekép képes kezelni az Encodert:

(DSP jumper helye)
| Funkció: | Jumper pozíció |
| Encoder duplázás: | - |
| Encoder 1:1 | 2-3 |
(DSP Config beállításai)
A DSP Config tüskesor 1-es lábát apró fehér pont jelöli.
A DSP beállítását az F0-ás LED felvillanásainak sebessége is
jelzi (1:1-nél lassul, duplázásnál gyorsul). A beállítások érvényesítéséhez
a Vezérlőt újra kell indítani, vagy a Test gombot kell megnyomni (ez motor
megmozdulásával jár)!
További információt talál a Motor Tuning
leírásnál is!

(F0 LED)
A szoftvert alapvetően a Profi2B Báziskártyánál ismertetett módon kell beállítani! Részletes beállítási infót itt talál, kérem alaposan olvassa el!
(a szoftvert a
Profi2B kártyára
kell állítani)
Itt csak az alapbeállítástól való eltéréseket tárgyalom! A Profi2B Setup leírásánál gyors setup File-t is talál a gyorsabb üzembe helyezés megkönnyítése véget!
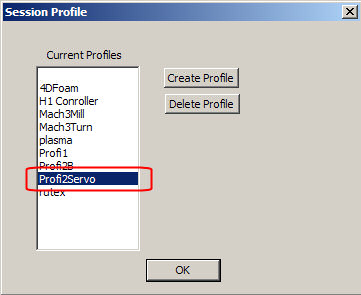
(telepített gyors setup új Servo profilt hoz létrte)
A Servo hajtáshoz szükséges nagyobb sebességek miatt, a Mach3-ast max. 45kHz-es sebességen érdemes hajtatni.
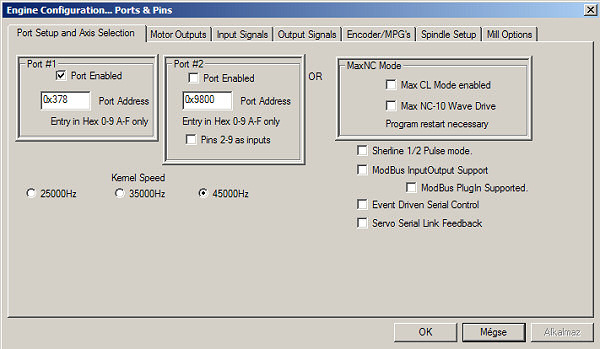
(ajánlott a max. 45kHz-es Kernel sebesség használata)
Nagyon fontosak a következő beállítások:
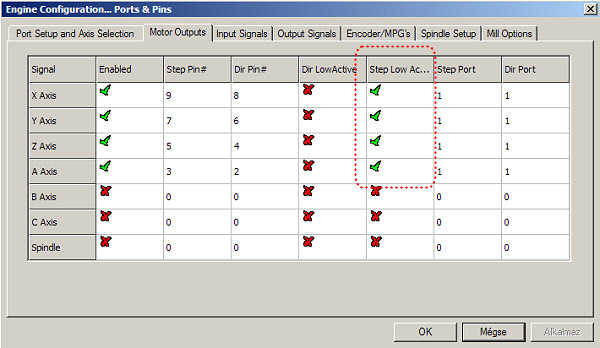
(A Profi2S Vezérlőnek szükséges beállítások)
Fontos, hogy a P2S Vezérlőnek be legyen állítva a Step Low Active jel! Amennyiben vegyesen használjuk a Profi2A léptetőmotoros Vezérlőt a Servo Vezérlővel (P2S), akkor a Profi2A-hoz tartozó Step jeleket NEM szabad Step Low Activre állítani, viszont a Profi2S Servo Vezérlőhöz tartozó Step jeleket be kell állítani!
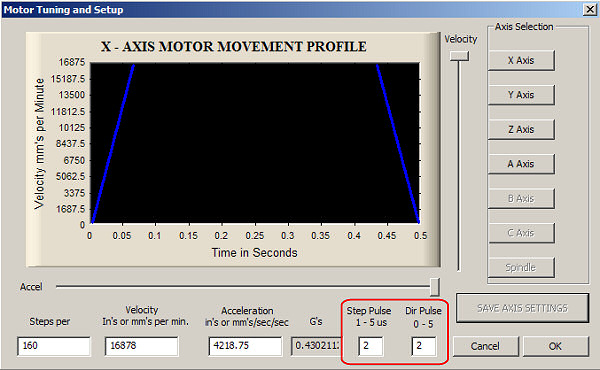
(Mach3 impulzus időzítései)
A Mach3 impulzus időzítéseit a következő értékekre ajánlott állítani:
Step Pulse: 2uS
Dir Pulse: 2Több mint 3m-es LPT kábel használata esetén mindkét értéket érdemes lehet duplájára emelni.
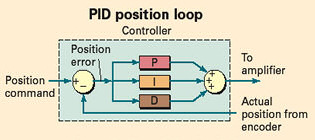
A PID szabályzó végzi el a motor teljes mozgási szabályzását, összetett matematikai eljárások segítségével. A szabályzó három felhasználó által állítható paraméterű résztaggal dolgozik. A három tag jelölése: P, I ,D tagok, melyekhez mind 1-1 trimmer potenciométer tartozik.

(PID trimerek)
(P, I, D trimmerek)
Az egyes szabályzótagok erősítését, a trimmerek beállításával
lehet szabályozni.
A folyamat összetettsége miatt, minden információt külön, a
Motor Tuning leírásban talál!
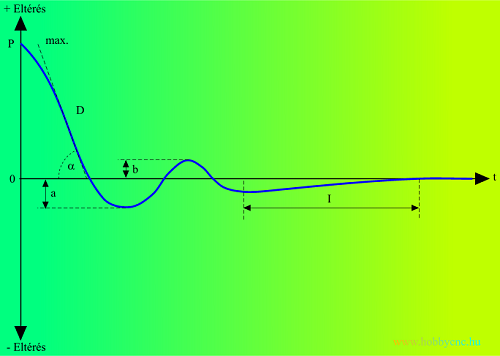
(PID szabályzó beállítása)

Két funkciója van:
1 - DSP Config (Encoder felbontások) érvényesítése és F0-ás LED hibajelek törlése. Ehhez csak 1× kell megnyomni.
2 - A Test gomb a DSP számára egy stressz szituációt hoz létre. Megnyomásakor hirtelen +255 Step nagyságú Error szint generálódik, melyet a PID megpróbál minél hamarabb lekezelni. Külső Step jel nélküli tesztelésekre használjuk, elsősorban a PID beállítás stabilitását ellenőrizzük vele. A vizsgálatokat a Profi2S Servo Monitoron végezzük Trigerezett módban. Részleteket a Motor Tuningnál olvashat róla!
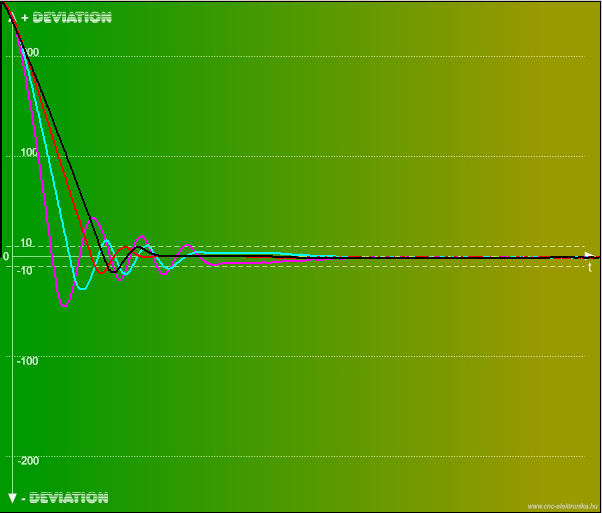
(A Test gomb Tranziens vizsgálata Servo Monitorral)