Léptető motorok finomhangolása maximális teljesítményre Profi Hobby CNC Vezérlő segítségével

Módosítva: 2005.04.17.
![]()
Léptető motorok finomhangolása maximális
teljesítményre Profi Hobby CNC Vezérlő segítségével
Módosítva:
2005.04.17.
Mivel az alkalmazott motor(ok) impedanciája adott(ak), és a működtetett mechanika fékező ellenállása is olyan amilyen, ezért a sebesség (teljesítmény) fokozására csak a motorok feszültség emelése add lehetőséget. Mivel a motorok tekercseim átfolyó áram erősége befolyásolja a fellépő nyomatékot (is), ezért arra kell törekedni, hogy a nagy lépésszámú sebesség tartományban minél hamarabb és minél nagyobb (maximum névleges) áramot hozzunk létre.
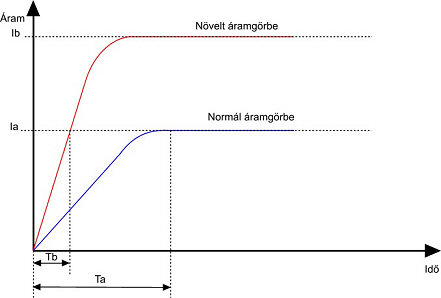
(feszültség emelés következményei)
Ia = a motor névleges feszültségéhez tartozó áramérték (0
sebesség mellett).
Ib = a növelt feszültséghez tartozó áramérték (0 sebesség mellett).
Ta = névleges motorfeszültséghez tartozó, max áram-kialakulási idő.
Tb = a növelt feszöltség mellett kialakuló, névleges áramhoz tartozó idő.
Tb < Ta
Tehát, ha a motorokat nem a névleges feszültségein, hanem attól nagyobb (tapasztalatom szerint kb. 2-3 szoros névleges értékkel) működtetjük, a nagy fordulatszámhoz tartozó nagy impedancián fellépő meredekebb áramgörbe miatt, lényegesen nagyobb nyomatékot adnak le!
A motorok sebességének csökkentésével arányosan csökken a tekercsek impedanciája. Ezzel fordított arányban a fellépő áramerősége növekszik. Természetesen nem megengedett a motorok üzemeltetése névleges áramerőségük felett.
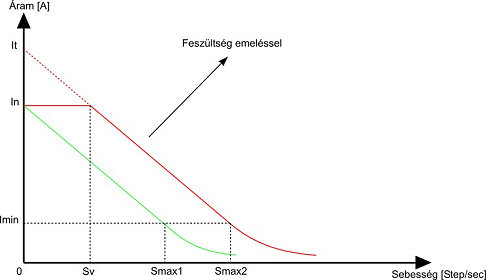
(sebesség fokozása feszültség emelésével)
Névleges motorfeszültségen fellépő
áram-sebesség görbe.
Növelt feszültség mellett fellépő áram-sebesség görbe.
In = motor névleges tekercsárama.
Imin = a mechanika mozgatásához szükséges minimális áram (nyomaték), elméleti
érték.
It = növelt feszültséghez tartozó, korlátozás nélküli, 0 sebesség melletti
áramerőség.
Smax1 = névleges feszültség mellett elérhető maximális sebesség.
Smax2 = növelt feszültség mellett elérhető maximális sebesség.
Sv = áram vezérlési töréspont (névleges áramra korlátozás),
Smax2 > Smax1
Sv pont, az a sebesség (léptetési idő) pont aminél a motor az adott emelt feszültség mellett pontosan névleges áramot vesz fel tekercsenként. Ha ettől a sebességtől lefelé térnénk el - más szóval, léptetések között több idő telne el - az áram átlépné a névleges tekercsenkénti értéket, amit a vezérlő helyes beállításával (Setup) meg kell akadályoztatni. Az Sv-től kisebb sebességek esetén (mász szóvakkal, nagyobb léptetési időt meghaladva), a vezérlő a névleges áram elérése után, térjen át a pihentető (pozícióban tartó) áramvezérlésre. A tekercsek árama nem lépi át a névleges értéket, sőt a sebesség csökkenésével egyre több pihentetést kap. Ezzel megakadályozódik a motorok túlmelegedése.
Sv pontot a vezérlő T1 regisztereivel (X, Y, Z) állíthatjuk be.
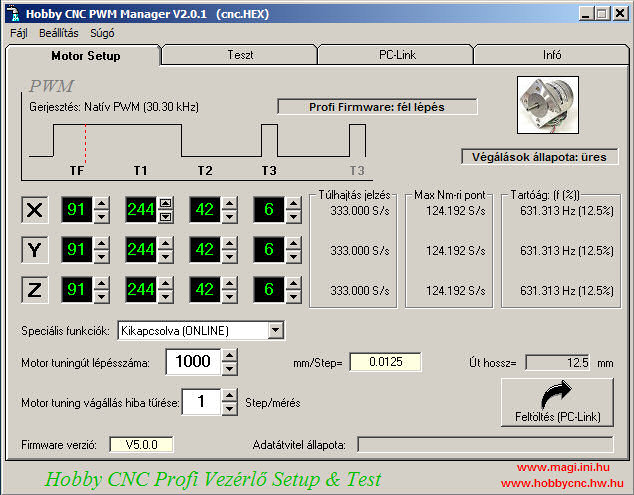
(áram vezérlési adatok)
Sv = 1/(T1*PWM oszcillátor alap)
Ahol a PWM oszcillátor alap az alkalmazott Firmware-tól függően (10 kHz vagy
30.30 kHz) 0.0001 (Hobbi), 0.000033 (Profi).
Az Sv pont értékét közvetlenül leolvashatjuk a Max Nm-ri pont mezőben [Step/sec].
Ez egyben a motor azon sebességi pontja, ahol a maximális nyomatékát leadja és
egyben a névleges áramát kell, hogy felvegye.
![]() Tápegység
kiválasztása:
Tápegység
kiválasztása:![]()
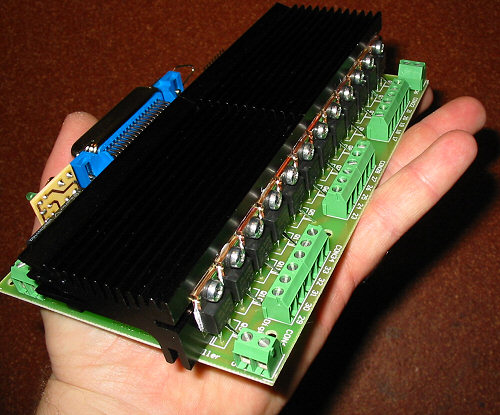
(növelt feszültségű változat hűtéssel, max 90V motortáp!)
A tapasztalat azt mutatja, hogy a motorok teljesítmény
fokozásához a tápfeszültségét a névleges motor feszültség 2-3 szoros értékére
érdemes választani. Természetesen biztonságosan bele kell férnie a vezérlő
maximális értékeinek (50V vagy az emelt feszültségű változat esetén 90V)!
Minél nagyobb egy motor induktivitása, annál jobban érdemes növelni a
feszültséget. Természetesen ez a nagy induktivitás fokozott induktív
lökőfeszültséget termel amit a FET-ek védő supressor diódáinak kell
felemésztenie (nagyobb igénybevétel). Mivel a két változat esetén a supressor
diódák 55V illetve 100V felet működnek, ezért a választott motor
tápfeszültséggel minél ezek alatta kell maradni. A motortápra ül rá a
léptetésekkor keletkező induktív lökőfeszültség, és ha a supressor diódák
működni kezdenek (elnyeletés) ez motorfékként hat a motorokra vissza, ami
teljesítmény romlást idéz elő (lehet, hogy amit nyerni szeretnénk a feszültség
emeléssel, elveszítjük a supressorok által keltett motorféknél).
A tápegység kiválasztásánál tapasztalatom szerint a kapcsoló üzemű vagy stabilizált tápegységeknél előfordulhat, hogy a motorok által keltett induktív tüskék megzavarhatják a tápegység elektronikáját, ezért ha lehet, a hagyományos (transzformátor-dióda-kondenzátoros) tápegységeket részesítsük előnyben, esetleg alaposabb kondenzátoros szűréssel (esetleg az un. Dump kapcsolással) próbálkozhatunk a hatás csökkentésével.

(táp elvi rajza)

Ajánlott PWM érzéketlen tuningtáp (12/24V; 120VA)
A leadott feszültség terheléstől függően: 15/30V.
Természetesen nem lehet a végtelenségig fokozni így a motorok teljesítményét, mert a névleges áram kialakulásán kívül még számos, a motor konstrukciójától függő egyéb paraméterek is behatárolják az elérhető teljesítményt.
![]() Sv
pont (T1) meghatározása:
Sv
pont (T1) meghatározása:![]()
![]()
A vezérlési töréspont (Sv) meghatározásához szükség van az adott motor áramának folyamatos mérésére, tehát kell egy alkalmas és kellően fürge ampermérő (multiméter) és a kérdéses motor összefogott középkivezetésénél sorba kell lépni vele, hogy minden fázis áramát egy helyen mérni tudjuk, vagy a motortápnál kell sorba lépni de ilyenkor a többi motor ne zavarja a mérést (kikötve/kikapcsolva legyenek). Mivel itt nem sima DC áramról van szó (impulzus szerű), sima ampermérővel a tehetetlensége miatt nem fogunk tudni pontos mérést készíteni (csak átlagoltat). A legpontosabb méréshez oszcilloszkóp kellene, hogy áram csúcsértékeket mérhessünk.
![]() A lényeg a következő:
A lényeg a következő:
- A mérés:
A motor teljes fordulatszám tartományában (0-100%), folyamatos áramméréssel
ellenőrizni kell a felvett áramot. A motor különböző fordulatszámokon, különböző
áramokat vesz fel (fordulatszámtól és a vezérlő PWM gerjesztésétől együttesen
függő, változó induktív ellenállás miatt). Ezek a felvett áramértékek sehol sem
lehetnek nagyobbak a motor névleges áramánál! Amennyiben van olyan fordulatszám
ahol a névlegest meghaladja, a T1 értékének csökkentésével vetessük visszább a
felvett árammaximumot. Ha a motor mindenütt alatta van a névleges áramnak,
emeljünk a T1-en addig, hogy a fordulatszám spektrum valamelyik (általában az
alsó egyharmada környékén) elérje a névleges áramot.
Ampermérős mérésnél már kisebb értékeknél is elérheti ezt az értéket (műszer
tehetetlensége miatt), viszont a Profi Firmware alkalmazása esetén mivel itt fél lépéses a vezérlés, hol egy, hol
két tekercs lesz gerjesztve, ezért hol egyszeres, hol kétszeres In (névleges) áram fog
folyni. A műszer tehetetlensége és a hol kétszeres, hol egyszeres áramok kb.
kompenzálják egymást, ezért ha simán In-t keresünk, nem tévedünk túl nagyot.
- A megfigyelés:
A motor finomhangolásához különösen alkalmas a
Mach2 CNC vezérlő program viszonylag
egyenletes léptető impulzusai miatt.
Állítsuk be úgy a Mach2-t, hogy nagyon
lassan gyorsítva gyorsuljon fel nagy sebességre (amit még a motorunk bír) és
állítsuk be a mozgató gomboknál a Jog: értékét legalább 700mm-re. és kattintsunk
a megfelelő tengely mozgató gombjára (programozott elmozdulás). Ilyenkor a
vezérlő az általunk beállított gyorsulással a max sebességig felgyorsítja a
motort, majd mielőtt elérné a 700mm-es elmozdulást lelassítja és megáll. Ez
alatt mérhetünk áramot és megfigyelhetjük a motor egyenletes járását széles
fordulatszám tartományban!
Mivel
mérésünk csak körülbelüli, és a motoroknak számos a fordulatszá+áram páros
alapján változó tulajdonságaik vannak, még egy fontos tesztet végeztessünk el
vele.
Ha a motor bárhol is rángatózik (ugrál), hangján
jellegzetes morgás halható és árama megemelkedik, ez azt jelenti, hogy
túlgerjesztjük a vasát. Ilyenkor a T1-et kicsit csökkenteni kell és
újratesztelni a felfutásokat. Érdemes úgy tesztelni, hogy a motor vagy a helyén
legyen össze kuplunglova (terhelve), vagy kezünkkel finoman fékezve megterheljük
a motort. A terheletlen motor becsaphatja a teszteket (rángatózás esetén)! T1 értékének a
csökkentésével a motor gerjesztését csökkentjük a vas telítési pontja alá, amíg
a motor simán nem fut. Túlságosan ne csökkentsük alá mert akkor meg erősen
csökken a nyomatéka alacsonyabb fordulatszámokon.
Ha a motor közvetlenül az elindulásakor (kimozdulásakor) rángatózik egy kicsit,
ez azt jelenti, hogy a pozícióban tartó erő kicsi. Ilyenkor a T2+T3 páros
arányán kell növelni egy kicsit (T2-t csökkentve vagy T3-mat növelve). Alapvető
fontosságú, hogy kellő stabilitással pozícióban tartsa a motort a fékező
nyomaték, mert hirtelen induláskor a motor, gyenge tartóági áram esetén,
oda-vissza ugrálhat egy pillanatra. Ez különösen igaz a nagy felbontású (pl: 1.8°-os) Japán motorokra! Ugyan akkor túlzásba se vigyük a
tartóági áramot, hogy érvényesüljön annak pihentető jellege.

A maximális rezonancia pont az áramcsúcs értékénél van (wmv
video, 594 kB)
A filmen egy 1Nm-es motor (3.6V, 3A, 12V-ról
járatva) látható.
- A korlátok:
Ha túlzott mértékben emeljük a motor feszültségét, a nagy meredekséggel
kialakuló áram hamarabb eléri a névleges áram értékét mint ahogyan a motor
forgórészében kialakulhatna a kellő nyomaték. Mivel ilyenkor is a T1-gyel a
névleges áramértékre korlátoztatunk, nem lesz ideje a motornak kellő nyomatékot
kifejtenie.
Tehát, ha egy bizonyos feszültségszint felé megyünk, a motor nyomatéka újra
hanyatlani kezd. Ezért nem lehet a végtelenségig fokozni egy motor nyomatékát
feszültség emeléssel!
A jól beállított Vezérlő nem engedi a motort In (névleges áram) felé emelkedni és kihasználja a megemelt feszültségből adódó teljesítmény tartalékokat!
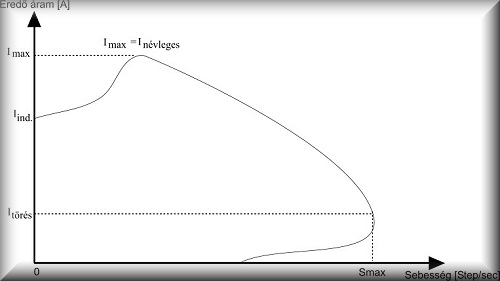
(Léptetőmotorok eredő áramgörbéje)
Iind=indulási áram (PWM vezérelt)
Imax=PWM-->DC áttérési pont (T1: alatta PWM vezérlés, felette tiszta DC
meghajtás)
Itörés=letőrési pont, egyben maximális sebességi pont
